原来搞单片机也可以面向对象
以下文章来源于果果小师弟 ,作者智果芯
摘要:在看别人单片机程序时,你也许是奔溃的,因为全局变量满天飞,不知道哪个在哪用了,哪个表示什么,而且编写极其不规范。自己写单片机程序时,也许你也是奔溃的。总感觉重新开启一个项目,之前的写过相似的代码也无法使用,得重新敲,代码重用度不高,编程效率低下,代码无法积累。而且感觉写这个代码没有思想,没有灵魂,没有框架,只是一个一个功能代码的堆砌,很空泛。
那么这个时候,你也许应该在单片机中引入面向对象的思想了,使代码更规范。
一、单片机程序框架
1、轮流执行
int main (void)
{
while(1)
{
sing();
dance();
play();
}
}
函数sing执行的时间比较长的话,函数dance就不能很快的被执行。任何一个函数死掉的话就会影响整个系统。
2、前后台
在使用 51、AVR、STM32 单片机裸机的时候一般都是在main函数里面用while(1)做一个大循环来完成所有的处理,即应用程序是一个无限的循环,循环中调用相应的函数完成所需的处理。有时候我们也需要中断中完成一些处理。相对于多任务系统而言,这个就是单任务系统,也称作前后台系统,中断服务函数作为前台程序,大循环while(1)作为后台程序。
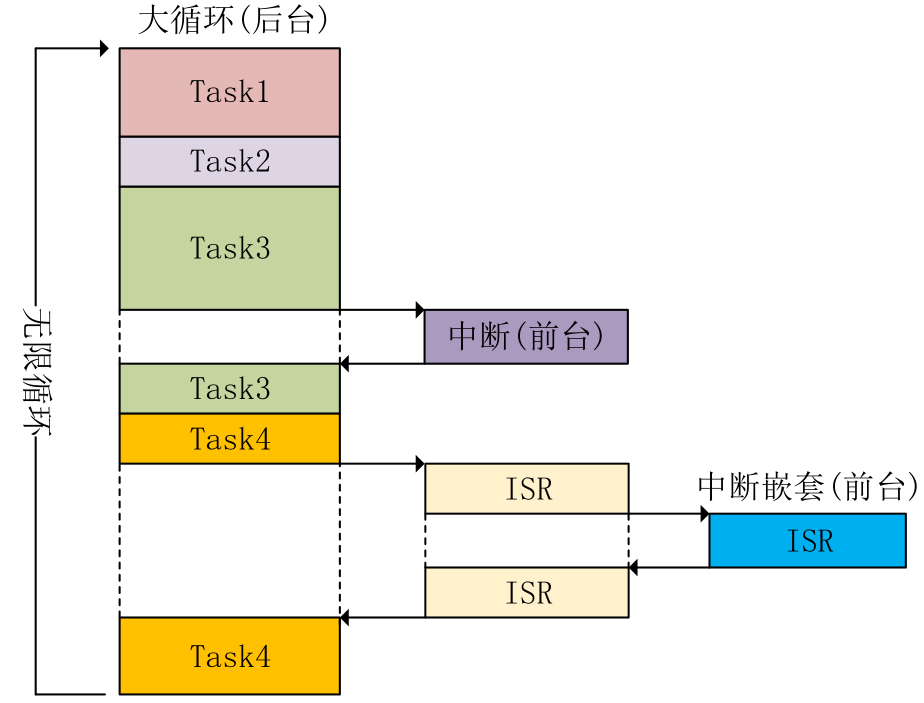
对应的编程代码大概是这样的:
void EXTI_IRQHandler()
{
flag = 1;
}
int main (void)
{
while(1)
{
if (flag = 1)
{
do_something();
flag = 0;
}
}
}
有什么问题?
前后台系统的实时性差,前后台系统各个任务(应用程序)都是排队等着轮流执行,不管你这个程序现在有多紧急,没轮到你就只能等着!相当于所有任务(应用程序)的优先级都是一样的。但是前后台系统简单啊,资源消耗也少啊!在稍微大一点的嵌入式应用中前后台系统就明显力不从心了。
3、多任务
void first_task()
{
while (1)
{
if(has_data())
put_data();
}
}
void second_task()
{
while (1)
{
if(get_data())
do_something();
}
}
int main(void)
{
create_task(first_task);
create_task(second_task);
start_scheduler();
}
多任务系统会把一个大问题“分而治之”,把大任务划分成很多个小问题,逐步的把小任务解决掉,大任务也就随之解决了,这些任务是并发处理的。注意,并不是说同一时刻一起执行很多个任务,而是由于每个任务执行的时间很短,导致看起来像是同一时刻执行了很多个任务一样。
二、执行的程序怎么写?
以按键为例,点亮一个小灯!
1.常规写法
int mian(void)
{
while (1)
{
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_3) == GPIO_PIN_SET)
{
printf("按键按下\r\n");
}
}
}
2.面向对象的写法
首先我们把每一个按键都看成一个对象,既然是对象就肯定有属性和行为,比如我们定义一个学生,那么这个学生有什么属性呢?
肯定有姓名、年龄、身高、体重对吧,这些是一些基本的属性,我们可以用一些单独的变量来定义它,比如:
typedef struct
{
uint8_t *name; //姓名(变量)
uint8_t age; //年龄(变量)
uint8_t height;//身高(变量)
uint8_t weight;//体重(变量)
} student_t;
但是一个学生还有很多行为对吧,它会唱歌、跳舞、打篮球、也会关注果果小师弟的公众号对吧,于是我们就可以这样定义:
typedef struct
{
uint8_t *name; //姓名(变量)
uint8_t age; //年龄(变量)
uint8_t height; //身高(变量)
uint8_t weight; //体重(变量)
void (*Sing_song)(void); //会唱歌(函数指针)
void (*Dance_latin)(void); //会跳舞(函数指针)
void (*Wechat_zhiguoxin)(void); //会关注果果的公众号(函数指针)
} student_t;
好了,这里我们提到了函数指针,所以就来说一说函数指针。
函数指针,顾名思义它就是一个指针,只不过它是一个函数指针,所以指向的是一个函数。类比一般的变量指针,指针变量,实质上是一个变量,只不过这个变量存放的是一个地址,在32位单片机中,任何类型的指针变量都存放的是一个大小为4字节的地址。
重要的话说三遍!牢记在心!!!为什要记住函数指针,因为在单片机面向对象编程中,结构体的成员不是变量就是函数指针这两种类型。变量就不用说了,函数指针理解就好。
其实函数指针可以类比一般的变量,看下面:
int a; < = > void Sing_song(void);
int * p; < = > void (*zhiguoxin)(void);
p=&a; < = > zhiguoxin = &Sing_song;
左边走义变量 a,右边定义函数Sing_song;左边定义 int指针,右边定义函数指针;左边赋值指针,右边赋值函数指针;
那么函数指针怎么用呢?我们还是以单片机为例,把按键类比为一个对象,这个按键有按键标志位,有长按或者短按,按键还有行为:按键初始化、按键循环检测等。
所以我们创建下面这样一个结构体,当然这个结构体不一定仅仅有这些变量和函数,这完全取决于你自己的定义,你想怎么定义就怎么定义,你甚至可以定义按键的颜色都。
typedef struct
{
uint8_t KEY_Flag; //标志位(变量)
uint8_t Click;//按下(变量)
void (*KEY_Init)(void); //按键初始化(函数指针)
void (*KEY_Detect)(void); //按键检测(函数指针)
} KEY_t;
现在已经定义了KEY_t这种类型的结构体,处理器还没有分配给这个结构体内存,因为我们只是声明这样一个类型,而类型是不占用内存的,只有我们定义对应的结构体类型的变量时才会在占用内存空间。
那么怎么定义一个结构体类型的变量呢?
KEY_t KEY1;
然后就要初始化结构体的成员变量了。
KEY_t KEY1 = {0,0,KEY_init,KEY_detect};
这里要注意了现在结构体有四个成员,前两个普通的变量,我们初始化为0,还有两个函数指针,我们是不是要把我们想写得函数的函数名字放在这里啊。
那么聪明的你肯定知道还要定义KEY_init();和KEY_detect();这两个函数。这两个函数可以这样写。
static void KEY_init()
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
static void KEY_detect()
{
uint8_t i = 0;
if(KEY1.KEY_Flag == 1)
{
HAL_Delay(100);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_3) == GPIO_PIN_SET)
{
printf("按键按下\r\n");
}
KEY1.KEY_Flag = 0;
}
}
好了具体函数中的代码我就不需要解释了。这样一个按键的对象我们就定义好了,这个按键我们赋予了"他"生命,有属性(变量)有行为(函数)。
这样我们在主函数就可以这样的调用,来实现相应的功能了。按键使用了中断,这里并没有讲解。
void main(void)
{
KEY1.KEY_Init();//初始化按键
while(1)
{
KEY1.KEY_Detect();//按键检测
}
}
如果理解了这些,那么面向对象的精髓你基本已经掌握了,接下来就是不断地去练习和实践了。
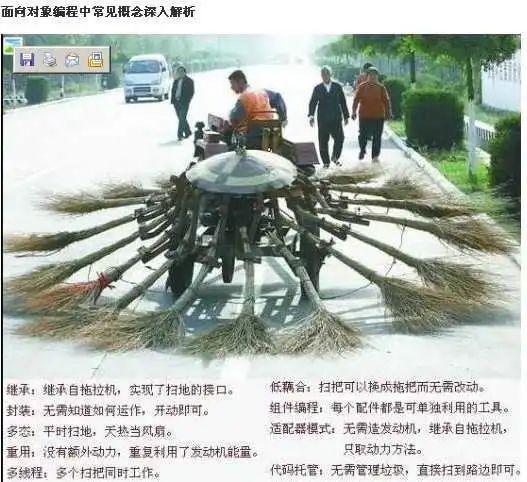
三、为什么要面向对象?
我们知道,现有的编程范式主要是:面向过程编程、面向对象编程、函数式编程。
对于流程清晰的简单程序,一般只有一条流程主线,很容易被划分成顺序执行的几个步骤,面向对象编程和面向过程编程没有太大差别,并且面向过程编程常常比面向对象编程更加直观高效。
但当我们面对一个大型的复杂程序,由于其错综复杂的流程和交互关系,很难将其简单地拆分成一条主线串成的简单步骤,而通常表现为一个网状关系结构。这个时候,面向过程编程的这种流程化和线性化的思维方式就会显得比较吃力,而面向对象编程的优势就比较明显了。
面向对象编程风格的代码更容易复用、扩展和维护、更高级、更人性化、更适合大规模复杂程序的开发。在Linux中就是用的面向对象编程,里面有很多的结构体、指针、链表等等。如果还没有接触到面向对象编程只能说明你做的东西还不够复杂。
在单片机举一个例子,一块开发板可能会适配不同的屏幕:
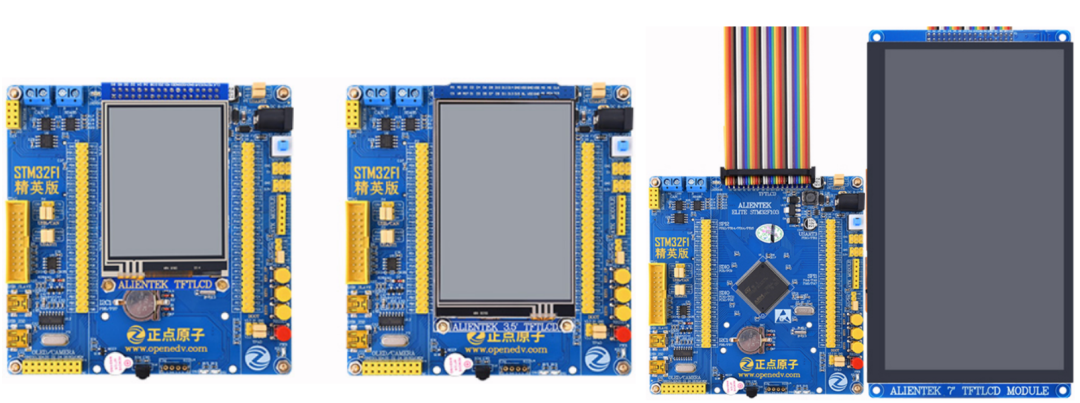
那么每一块板子肯定有不同的代码适配,在程序中我们可以读出屏幕的ID,然后通过if判断来执行不同的指令,就行这样。

如果使用面向对象编程,那么就可以这样写代码。
typedef struct lcd{
uint8_t type;
void (*LCD_Init)(void)
}lcd_t, *plcd_t;
int Read_id()
{
/* 0: LCDA
* 1: LCDB
*/
return 0;
}
int Get_Lcd_Type(void)
{
return Read_id();
}
void LCDA_Init(void)//屏幕A初始化
{
LCD_WR_REG(0xCF);
LCD_WR_DATA(0x00);
LCD_WR_DATA(0xC1);
LCD_WR_DATA(0X30);
}
void LCDB_Init(void)//屏幕B初始化
{
LCD_WR_REG(0X11);
delay_ms(20);
LCD_WR_REG(0XD0);
LCD_WR_DATA(0X07);
}
lcd_t openedv_com_lcds[] = {
{0, LCDA_Init},
{1, LCDB_Init},
};
plcd_t get_lcd(void)//获取到屏幕类型
{
int type = Get_Lcd_Type();
return &openedv_com_lcds[type];
}
int main(void )
{
plcd_t lcd;
lcd = get_lcd();//获取到屏幕类型
lcd-> LCD_Init();//初始化对应屏幕
while (1)
{}
}
这里只是伪代码处理办法,原理就和上面所讲的一样,在结构体中使用变量和函数。
到这里你应该掌握了面向对象得单片机编程方法,一起来试验几个例子:
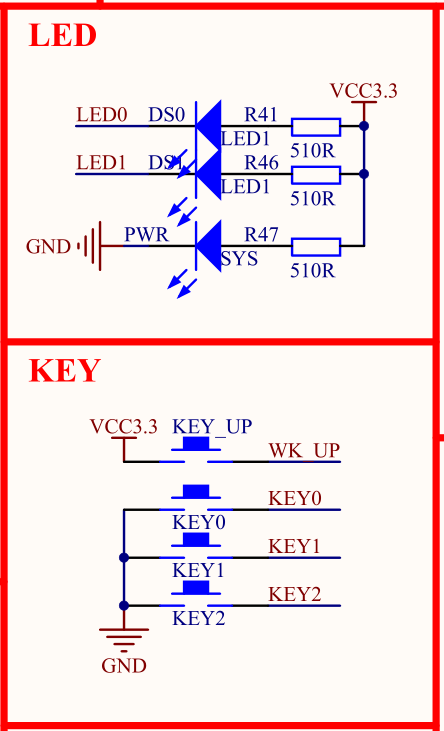
LED灯
typedef struct
{
void (*LED_ON)(uint8_t LED_Num); //打开
void (*LED_OFF)(uint8_t LED_Num); //关闭
void (*LED_Flip)(uint8_t LED_Num); //翻转
} LED_t;
按键KEY
typedef struct
{
uint8_t KEY_Flag; //标志位(变量)
uint8_t Click; //按下(变量)
void (*KEY_Init)(void); //按键初始化(函数指针)
void (*KEY_Detect)(void); //按键检测(函数指针)
} KEY_t;
蜂鸣器BEEP
typedef struct
{
uint8_t Status; //状态
void (*ON)(void); //打开
void (*OFF)(void); //关闭
} BEEP_t;
串口UART
typedef struct
{
USART_TypeDef *uart;/* STM32内部串口设备指针 */
uint8_t *pTxBuf; /* 发送缓冲区 */
uint8_t *pRxBuf; /* 接收缓冲区 */
uint16_t usTxBufSize; /* 发送缓冲区大小 */
uint16_t usRxBufSize; /* 接收缓冲区大小 */
uint16_t usTxWrite; /* 发送缓冲区写指针 */
uint16_t usTxRead; /* 发送缓冲区读指针 */
uint16_t usTxCount; /* 等待发送的数据个数 */
uint16_t usRxWrite; /* 接收缓冲区写指针 */
uint16_t usRxRead; /* 接收缓冲区读指针 */
uint16_t usRxCount; /* 还未读取的新数据个数 */
void (*RS485_Set_SendMode)(void); //RS-485接口设置为发送模式
void (*RS485_Set_RecMode)(void); //RS-485接口设置为接收模式
}UART_T;

前往“发现”-“看一看”浏览“朋友在看”